- accueil
- réseaux à l'échelle 0
- réseaux de monorails
- train de jardin
- techniques
- électronique
- informatique
- ARDUINO
- Fumigènes
- dcc
- Introduction
- Structure des paquets DCC
- ARDUINO et DCC
- Utilisation d'un ampli audio comme booster
- Création d'un signal DCC avec un PC
- Contrôle d'un signal DCC
- Rétrosignalisation
- Détecteurs d'occupation
- Utilisation du LokProgrammer
- SPROG II
- DCC transmis par radio
- Présentation du programme CARTO-DCC
- Commande d'un réseau DCC en WiFi
- programmation des locos MTH
- Régulateur DCC à commande vocale en Français
- Commande des aiguilles en DCC
- Les décodeurs sonores
- Contact
Utilisation d'un servomoteur en modélisme ferroviaire
Les servomoteurs sont très utilisés dans les systèmes de radiocommande en modélisme (voitures, bateaux, avions). Ils servent essentiellement à commander les systèmes de direction.
Ils sont peu utilisés en modélisme ferroviaire et pourtant ils peuvent être très utiles pour réaliser certaines fonctions comme la commande d'aiguilles (alternative aux moteurs lents), la fermeture des barrières d'un passage à niveau ou d'une porte de remise à locos.
Le prix est très raisonnable. On en trouve à moins de 10 Euros.
La commande s'effectue à l'aide de 3 fils: un fil pour l'alimentation (en général 5 volts), un fil pour la masse et un fil qui transmet le signal de commande formé d'une suite d'impulsions.
1. Description d'un servomoteur
Un servomoteur est constitué de 3 éléments:
- Un moteur électrique avec rotation dans les deux sens
- un train d'engrenages démultiplicateurs actionnant le palonnier de l'axe de sortie
- un circuit électronique de commande du moteur
Vous trouverez une description détaillée du principe de fonctionnement sur le site web de Francis THOBOIS.
2. Commande d'un servomoteur
Le signal externe de commande de position est une impulsion positive dont la figure ci-dessous donne les caractéristiques.
Au repos la tension est nulle ( niveau 0 ). Cette tension passe brusquement à + 5V ( niveau 1 ) pendant un temps variable court (de 1 à 2 ms ). Cette impulsion se répète toutes les 20 ms environ, soit 50 fois par seconde.
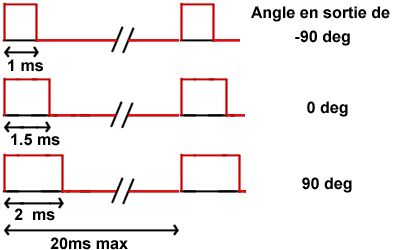
Seule compte la durée de 1 à 2 ms qui varie en fonction de la position désirée du palonnier. Une standardisation des valeurs s'est imposée :
1 ms --> limite basse ( gauche -90 degrés par ex. )
1.5 ms --> neutre
2 ms --> limite haute ( droite + 90 degrés par ex.)
3. Dispositif de commande manuelle par un petit circuit électronique
Le schéma du circuit à réaliser est donné sur la figure ci-dessous.
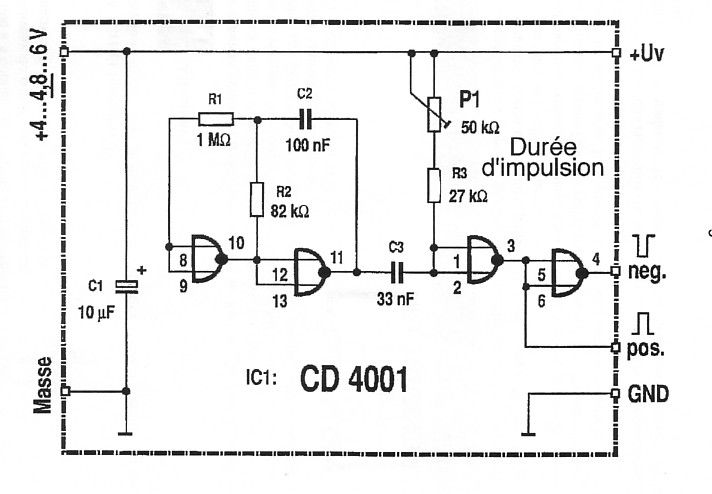
Il utilise un circuit intégré CD 4001 qui est mis en circuit comme multivibrateur astable. Des impulsions positives de durée comprise entre 0.8 et 2.2 ms et de période 18 ms sont présentes sur la sortie 3 du CI. La largeur d'impulsion est réglée à l'aide du potentiomètre P1. Pour l'alimentation, on peut utiliser une pile de 4,5 Volts ou une alimentation 5 Volts classique.
On peut trouver ce circuit en kit chez CONRAD à moins de 10 Euros (kit TESTEUR DE SERVO ref 190151-62)
4. Utilisation pour la commande d'une aiguille
On utilise souvent des moteurs lents utilisant un petit moteur électrique (LEMACO, FULGUREX, TORTOISE) et des contacts de fin de course pour arrêter la rotation du moteur dès que l'aiguillage a fini de changer de position. Ces moteurs sont commandés par une inversion de polarité aux bornes du moteur. Au niveau de la commande directe, on utilise un inverseur avec deux contacts.
Dans le cas d'un servomoteur, la connexion à l'aiguille est aussi simple.
Il suffit de relier le palonnier du servo à l'aiguille par une petite tige métallique (voir les photos ci-dessous).
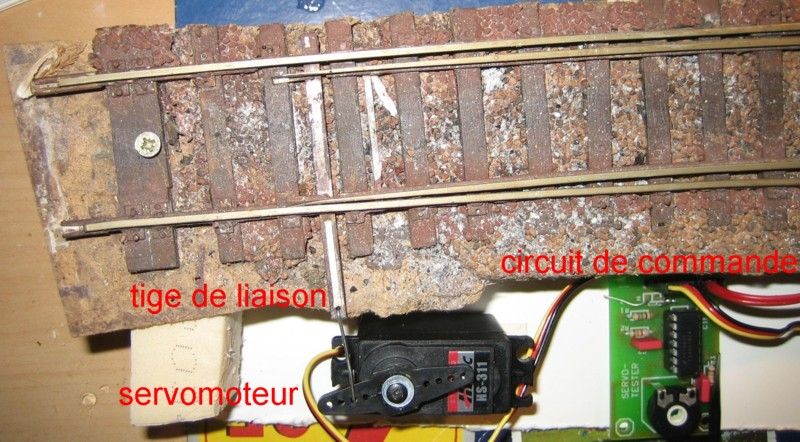

La commande s'effectue avec le potentiomètre du circuit de commande. On tourne celui-ci à droite ou à gauche pour commuter l'aiguille. La vitesse de commutation est proportionnelle à la vitesse de manoeuvre du potentiomètre. Le servo garde sa position même lorsque l'on coupe la tension d'alimentation.
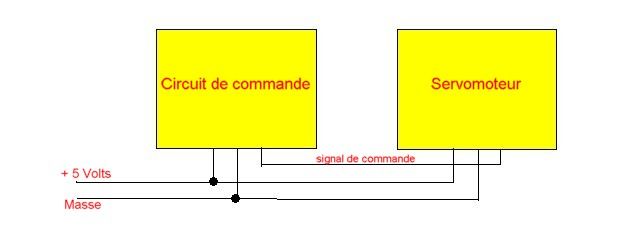
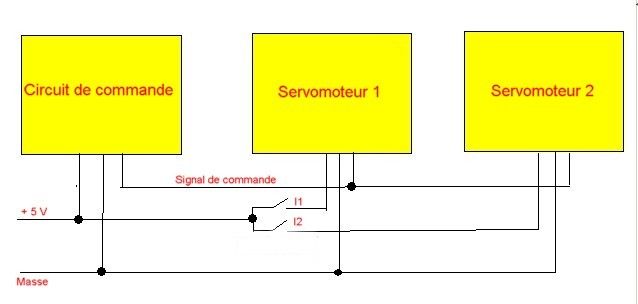
La figure ci-dessous montre les connexions entre le circuit de commande et le servomoteur.
Par rapport à un moteur lent du commerce, le servomoteur présente les avantages suivants:
- vitesse de commutation ajustable
- longueur de déplacement des lames d'aiguille ajustable
- grande puissance qui permet de commuter sans problème les aiguilles des grandes échelles (Zéro, LGB)
Si l'on veut commander plusieurs aiguilles, un seul circuit de commande suffit. Il suffit d'insérer entre le circuit de commande et chaque aiguille un interrupteur qui transmet la tension d'alimentation (5 Volts) à l'aiguille à commuter (voir le schéma ci-dessous).
5. commande par PC
5.1 commande par l'interface parallèle
Si le réseau est commandé par un PC, on peut se passer du circuit de commande du servo et générer directement par le PC le signal de commande.
La figure ci-dessous montre la connexion entre l'interface parallèle du PC et le servomoteur.
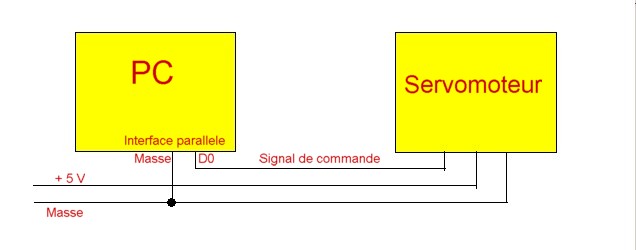
Le signal de commande est fourni par le PC sur l'interface parallèle. Les signaux ont une amplitude de 0 et 5 Volts directement compatibles avec l'entrée du servomoteur.
Voici à titre d'exemple un sous programme écrit en Visual Basic qui permet de générer une impulsion de durée comprise entre 1 et 2 ms avec une période de répétition d'environ 10 ms. le signal de sortie correspond à D0 sur l'interface parallèle du PC.
'emission d'un 1'
OUT 888, 1
FOR j = 1 TO p1
NEXT j
'émission d'un zéro'
OUT 888, 0
FOR j = 1 TO p2
NEXT j
Le paramètre p1 permet d'ajuster la durée de l'impulsion (entre 1 et 2 ms) et le paramètre p2 la durée p entre 2 impulsions (p = p1 + p2). p1 et p2 dépendent de la fréquence du processeur du PC utilisé.
Pour les ajuster automatiquement en fonction du PC utilisé, il faut écrire un petit programme qui va déterminer la valeur minimale p1min de p1 correspondant à une durée d'impulsion de 1 ms.
Le programme compte le nombre n d'impulsions émises pendant une durée dt de une seconde. On obtient ainsi la valeur de p1: p1 = n / 1000
Il suffit alors de fixer la valeur de p1 pour avoir la position choisie du palonnier.
palonnier à -90 degrés --> p1 = p1min
palonnier en position neutre --> p1 = 1,5 x p1min
palonnier à +90 degrés --> p1 = 2 x p1min
La durée entre deux impulsions est p = 10 x p1min
p2 = p - p1
Vous pouvez télécharger le programme de test d'un servomoteur écrit en Visual Basic en cliquant ici.
5.2 commande par le port série ou USB
On trouve dans le commerce des modules qui se connectent sur le port série et qui permettent de commander des servos. Par exemple le module SSC32 de Lynxmotion permet de controler jusqu'à 32 servos. On le trouve chez GOTRONIC .
Pour utiliser le port USB, il suffit d'ajouter un convertisseur USB-RS232 que l'on trouve facilement dans le commerce..
.
6. commande en DCC
6.1 commande par un décodeur de locomotive
Les décodeurs ZIMO MX620, MX64 et MX640 disposent de deux sorties pour la commande de servos.
Le schéma ci-dessous montre les connexions à réaliser.
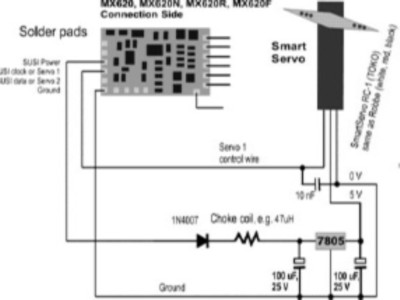
Pour les décodeurs MX620 ou MX64D, le 5 Volts doit être fournie par une source externe, alors que le modèle MX64DV5 fournit en interne la tension de 5 Volts.
6.1 commande par un décodeur d'accessoires
Certains décodeurs d'accessoires sont prévus pour la commande de servos. C'est le cas du module SwitchPilot Servo de ESU qui permet de commander 4 servos.