Commande d'un réseau en DCC avec un module ARDUINO UNO ou NANO
Réalisation d'une centrale DCC pilotée par ordinateur ou par un smartphone
Menu
1.Généralités
2. Schéma de la centrale
3. Détecteurs d'occupation
4. mode manuel sans ordinateur avec commande d'une loco par un smartphone avec une application android intitulée "BLUEDCC"
5. Téléchargement des programmes
6. mode automatique avec ordinateur
1 Généralités
Cette petite centrale DCC à faible coût est basée sur un Arduino Uno ou Nano qui peut être suffisant pour un petit réseau..
Les principales fonctionnalités sont les suivantes:
- pilotage d'un train avec un smartphone connecté en Bluetooth à la centrale
- pilotage de 1 à 4 trains en automatique avec un ordinateur et le logiciel CARTO-DCC
- protection contre les court-circuits
- 96 adresses de locos possibles entre 3 et 99
- 1 à 8 détecteurs d'occupation qui peuvent être intégrés à la centrale
- 1 à 5 détecteurs de passage à infra-rouge
- courant de sortie max de 3A
- commande de 7 accessoires. Vous trouverez le schéma d'un décodeur d'aiguille en cliquant ici.
- diffusion d'une annonce en gare en utilisant une petite enceinte Bluetooth connectée au smartphone. L'enceinte Bluetooth peut être dissimulée dans un bâtiment.
La centrale réalisée avec un Arduino Uno ou Nano offre 3 modes de fonctionnement:
- mode manuel sans ordinateur avec commande d'une loco par un smartphone avec une application android intitulée "BLUEDCC". L'application permet aussi de commander les accessoires .
- mode automatique avec ordinateur. Dans ce mode, c'est le programme CARTO-DCC de l'ordinateur qui gére les trajets et l'ARDUINO se contente de générer le signal DCC et d'envoyer au PC les signaux de rétrosignalisation. Il est possible d'avoir 4 locos en fonctionnement simultané.
- mode enregistrement d'un trajet. Dans ce mode, on pilote une loco avec un smartphone et l'ordinateur enregistre tous les mouvements de la loco avec le logiciel CARTO-DCC.
Après l'enregistrement du trajet, on le transfère dans un itinéraire. On choisit le numéro de l'itinéraire et on donne un numéro au trajet ( entre 1 et 4). Le trajet peut être enregistré comme unique ( il ne sera exécuté qu'une seule fois) ou en boucle.
2 Schéma de la centrale
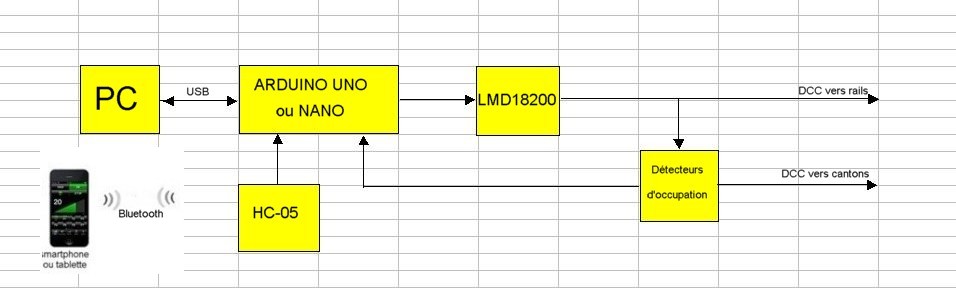
La centrale DCC est constituée des éléments suivants:
- un module ARDUINO UNO ou NANO qui génère le signal DCC
- un booster réalisé avec un module LMD18200 qui peut fournir 3A
- un module HC-05 ou HC-06 qui permet de connecter un smartphone à l'Arduino en Bluetooth
- un module détecteur de courant ACS712 qui permet de protéger la centrale contre les court circuits
- une alimentation qui fournit une tension comprise entre 15 et 18 Volts et un courant supérieur ou égal à 3A
- 1 à 8 détecteurs d'occupation qui peuvent avantageusement être intégrés à la centrale. Ainsi il n'y a qu'un seul fil par canton entre la centrale DCC et le rail isolé du canton, ce qui minimise le cablage.
- 1 à 5 détecteurs de passage
Le schéma de principe de la centrale est donné sur la figure ci-dessous.
La figure ci-dessous montre les interconnexions entre les composants avec un Arduino Nano.
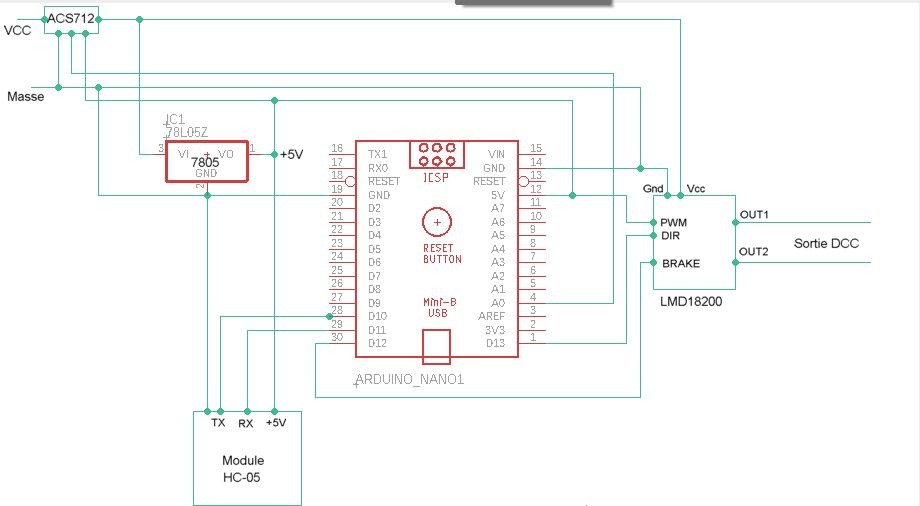
L'Arduino est alimenté en 5V grâce à un régulateur 7805 qui est connecté à l'alim 15V.
L'affectation des broches de l'Arduino est la suivante:
- broches D2 à D9: entrée des détecteurs d'occupation des cantons
- broche D10: connectée à la broche TX du module HC-05
- broche D11: connectée à la broche RX du module HC-05
- broche D12: connectée à la broche BRAKE du module LMD 18200
- broche D13: sortie DCC, connectée à la broche DIR du module LMD 18200
- broche A0: connectée à la sortie du module ACS 712
- broches A1 à A5: connectées aux détecteurs de passage à IR GP2Y0A21YK
Les connexions du module HC-05 avec l'Arduino sont les suivantes:
- La broche VCC est reliée au +5V
- la broche GND est reliée à une broche GND de l'Arduino
- la broche TXD est reliée à la broche 10 de l'Arduino
- la broche RXD est reliée à la broche 11 de l'Arduino
- la broche State est reliée à une diode LED
l'Arduino génère le signal DCC sur la broche D13.
Le booster est un cirtcuit LMD18200 qui peut fournir un courant jusqu'à 3A
L'entrée GND est reliée à la masse de l'ARDUINO
L'entrée PWM est reliée au +5V
L'entrée DIR est reliée à la sortie DCC de l'ARDUINO ( broche D13)
L'entrée BRAKE est reliée à la broche D2 de l'ARDUINO.
Le signal DCC amplifié est disponible sur les sorties OUT1 et OUT2 du module LMD18200
L'amplitude du signal DCC dépend de la tension d'alimentation continue appliqué sur l'entrée V+ du module. Avec une alim de 16 Volts, on obtient un signal DCC de 16 Volts efficaces environ qui est suffisant pour faire fonctionner un réseau DCC.
Le booster est protégé contre les court-circuits. Le courant fourni par l'alim continue passe dans un module de mesure de courant ACS712 dont la sortie est reliée à la broche A0 de l'ARDUINO. Si le courant dépasse 3A alors la sortie D12 de l'Arduino passe à l'état haut (+5V) ce qui a pour effet de couper la tension en sortie du module LMD18200. Lorsque le court circuit a été supprimé, il faut envoyer avec le smartphone un octet de valeur 220 à l'ARDUINO pour rétablir la tension DCC en sortie du module LMD18200 (la sortie D12 et donc la broche BRAKE du LMD passe à 0).
La sortie OUT1 du module LMD 18200 est connectée aux entrées des détecteurs d'occupation dont les sorties sont reliées aux cantons.
La photo ci-dessous montre le boîtier qui abrite la centrale. Les dimensions sont les suivantes. Longueur: 19 cm, largeur: 13 cm, hauteur: 5 cm
La photo ci-dessous montre le boîtier ouvert avec les composants autour de l'Arduino.
3. Détecteurs d'occupation
Les détecteurs d'occupation peuvent avantageusement être intégrés à la centrale. Ainsi il n'y a qu'un seul fil par canton entre la centrale DCC et le rail isolé du canton, ce qui minimise le cablage.
Le schéma d'un détecteur d'occupation de canton est donné sur la figure ci-dessous:
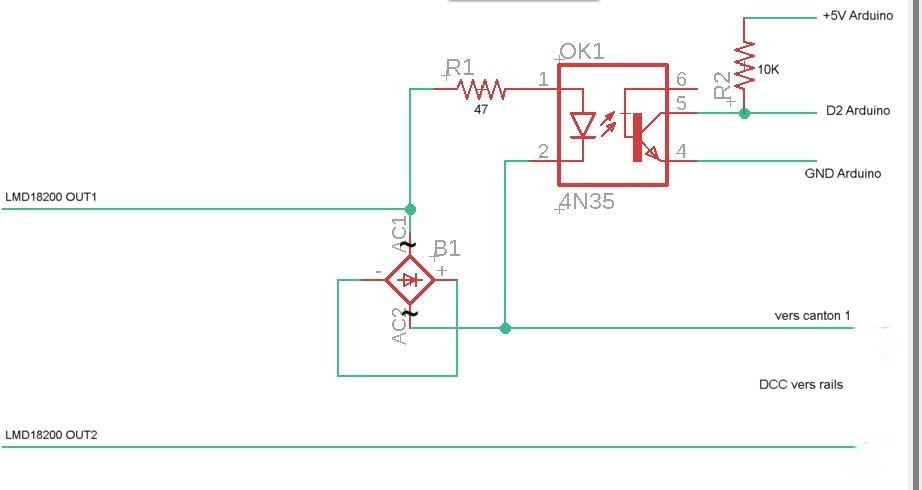
Le détecteur est constitué par un redresseur double alternance et par un optocoupleur 4N35.
les bornes + et - du redresseur sont reliées entre elles. Le signal DCC en sortie OUT1 du module LMD 18200 est appliquée sur une des broches "~" du redresseur et l'autre broche "~" est reliée au rail isolé du canton.
La tension aux bornes ~ du redresseur est appliquée à l'entrée d'un optocoupleur 4N35 avec une résistance de 47 Ohms en série. La sortie 5 de l'optocoupleur est relée à la broche D2 de l'Arduino. Une résistance de 10 KOhms est plaçée entre la sortie 5 de l'optocoupleur et le +5V.
En absence de train sur le canton, la tension à l'entrée D2 de l'Arduino est égale à 5V. En présence de train sur le canton, la tension est proche de 0.
4. mode manuel sans ordinateur avec commande d'une loco par un smartphone avec une application android intitulée "BLUEDCC"
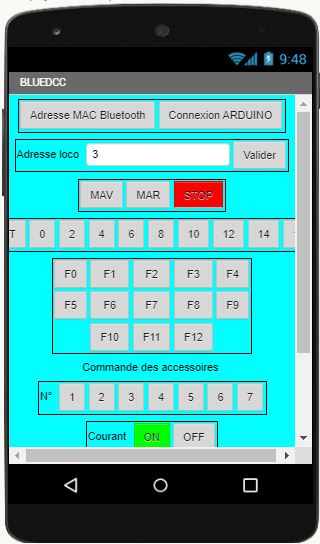
La commande d'une loco s'effectue en Bluetooth avec un smartphone ou une tablette en utilisant une application android intitulée "BLUEDCC"
Cette application appelée BLUEDCC est un petit régulateur DCC qui se connecte à l'ARDUINO en Bluetooth par l'intermédiaire du module HC-05.
Vous pouvez voir ci-dessous une copie d'écran du smartphone.
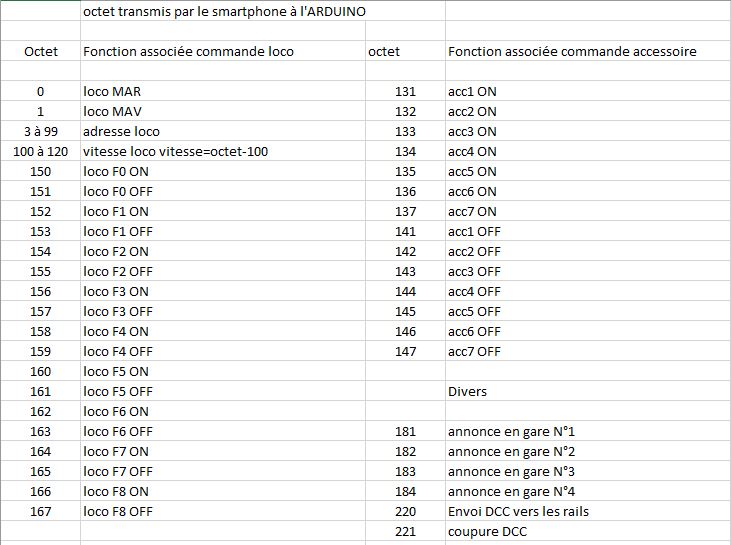
Voici la liste des valeurs de l'octet transmis par le smartphone à l'Arduino et les fonctions associées.
Avant de lancer l'application, il faut aller dans les paramètres de la tablette activer le bluetooth et se connecter au module HC-05 qui doit être sous tension. Le code à entrer est: 1234.
Ensuite, on peut lancer l'application Bluedcc. Pour l'utiliser, il suffit d'appuyer sur le bouton intitulé "Adresse MAC Bluetooth" et de choisir dans la liste des éléments qui s'affichent le module HC-05.
Pour se connecter à l'Arduino, il faut appuyer sur le bouton intitulé "Connexion ARDUINO".
J'ai réalisé cette application à l'aide du logiciel en ligne intitulé MIT App Inventor 2 que l'on peut trouver à l'adresse suivante:
http://ai2.appinventor.mit.edu/
Ce logiciel est très facile à utiliser et permet de créer une application ANDROID très rapidement sans connaître le language Java.
5. Téléchargement des programmes
Vous pouvez télécharger le programme pour l'ARDUINO ainsi que l'application bluedcc.apk pour le smartphone ou la tablette en cliquant
ici.
Pour installer l'application "BLUEDCC" sur votre smartphone, vous pouvez scanner le QR Code ci-dessous:

6. Mode automatique avec ordinateur
Dans ce mode de fonctionnement, l'ARDUINO est utilisé pour générer les trames DCC et gérer la rétrosignalisation. C'est le logiciel CARTODCC installé sur le PC qui génère les commandes. La liaison entre le PC et l'ARDUINO s'effectue par le cable USB L'ARDUINO utilise la communication série (Software Serial Library) pour communiquer avec le PC.
Vous trouverez une description et un mode d'emploi du logiciel CARTODCC en cliquant ici.
Page suivante
Page précédente
Retour page d'accueil