Les voies en coulisse dans le bureau et le pont tournant ATLAS
1. Présentation du réseau
Une voie unique qui traverse le mur relie le réseau modulaire du grenier à un petit réseau installé dans le bureau qui sert de coulisse.
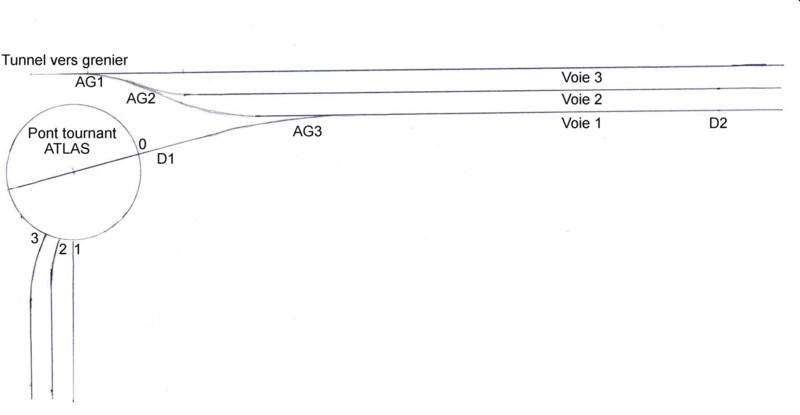
Le schéma du réseau dans le bureau est donné sur la figure ci-dessous.
Ce réseau comprend 3 voies desservies par deux aiguillages (AG1 et AG2)
La troisième voie permet d'accéder par l'aiguille AG3 à un pont tournant de la marque ATLAS qui donne accès à 3 autres voies où sont stockées des locos.
Le réseau inclut aussi deux détecteurs de passage, l'un à infra-rouge (D1) et l'autre à ultra-sons (D2).
Voici quelques photos de ce mini-réseau installé dans le bureau qui sert de coulisse au réseau modulaire.
2.Commande du réseau
Le résau est piloté par un circuit électrique à base d'Arduino qui commande les aiguilles AG1 et AG2 ainsi que le détecteur de passage à ultra-sons D2. L'Arduino est connecté en USB au PC qui pilote le réseau.
3 Pont tournant ATLAS
Ce pont est un jouet qui ne représente pas la réalité car le plateau tourne avec le tablier. L'avantage est qu'il n'est pas cher et qu'il fonctionne bien.
Pendant le fonctionnement, le plateau tourne et s'arrête automatiquement pendant quelques secondes à chaque sortie de voie. Cela laisse à l'opérateur suffisamment de temps pour couper le courant au moteur de la plaque tournante lorsque le pont est aligné avec la voie de sortie.
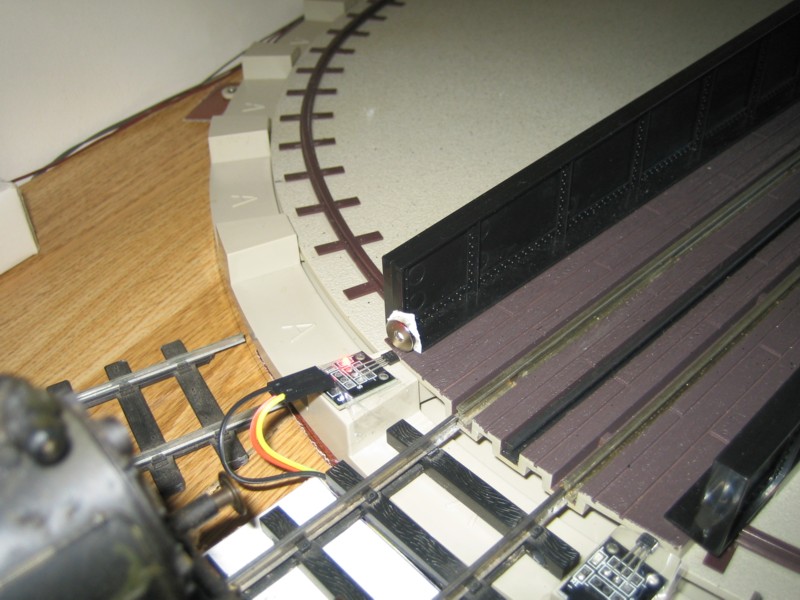
Le mécanisme de commande du pont est visible sur les photos ci-dessous.
Sur mon réseau, il y a quatre sorties de voies, la voie qui est reliée au réseau et trois voies de stockage des locos.
Le pont tournant est commandé en automatique par un montage à base d'Arduino.
La détection de sortie des voies est réalisée par un petit aimant collé à l'extrémité du tablier du pont et par des capteurs à effet Hall qui sont collés sur chaque sortie de voie comme on peut le voir sur la photo ci-dessous.
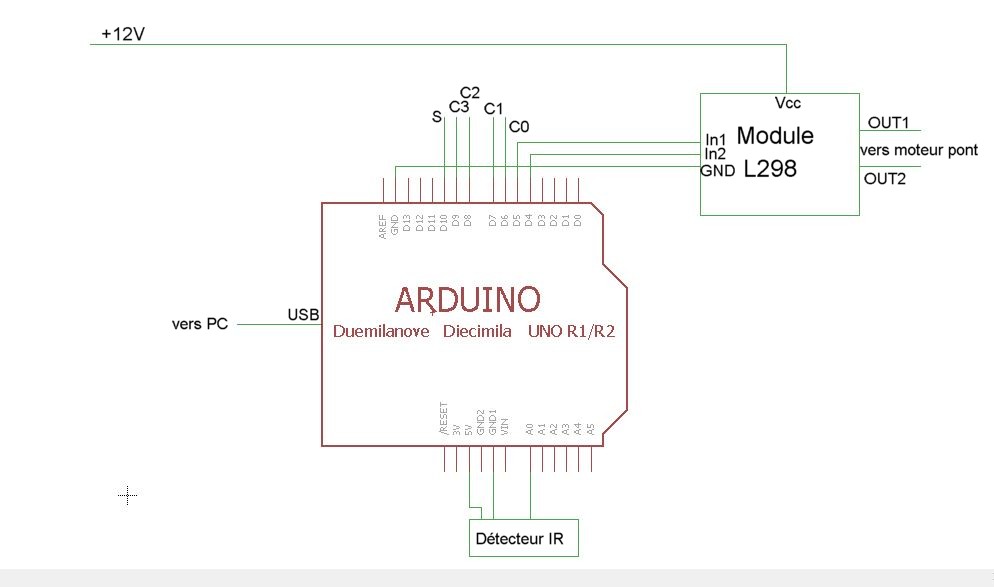
Le schéma du circuit de commande du pont est donné ci-dessous:
Il est constitué par un Arduino Uno et par un module L298 qui fournit la tension au moteur du pont sur les sorties OUT1 et OUT2. De plus l'Arduino reçoit les signaux des 4 capteurs à effet Hall sur les entrées 5 à 9. La sortie 10 alimente un servo qui commande l'aiguille AG3. Le détecteur de passage à infra rouge qui synchronise les mouvements des locos sur le pont est relié à l'entrée A0. L'ARDUINO est connecté en USB au PC qui pilote le réseau.
Vous pouvez télécharger le programme Arduino en cliquant ici.
Enfin pour terminer, voici une petite vidéo qui montre le pont tournant en action. Le pont et les locos sont commandés en automatique par le PC avec le programme CARTO-DCC écrit en Visual Basic.